
连续生产技术,就服失重喂料机设备!
能够实现精确喂料和连续补料的失重喂料机设备,对固体制剂连续式生产过程起着至关重要的作用。随着制药行业继续调研和采纳连续生产,失重式(LIW)喂料机的作用以及这种喂料机带来的精确喂料和连续补料能力将越发重要。
美国食品与药品管理局(FDA)最近批准了2种采用连续生产技术生产的固体制剂配方,这次里程碑式的批准让全球药业界注意到连续生产技术的优点。随着制药行业继续调研和采纳连续生产,失重式(LIW)喂料机的作用以及这种喂料机带来的精确喂料和连续补料能力将越发重要。
补料方法的重要性、补料过程中的控制算法、补料设备反应时间以及补料料斗的尺寸都是重要的变量,但这些变量经常在设计连续生产系统时被忽视。本文概述了补料过程中一些重要的考虑因素。以及这些因素对失重式喂料机的精度的影响,其对整个连续生产过程的影响。
失重式喂料
失重式喂料机通过称量整个喂料机、料斗和料斗内物料的重量来控制喂料量(如图1所示)。通过控制喂料装置的速度就可以得到一个等于设定喂料速度的每单位时间系统失重量。作为失重式喂料过程的紧密组成部分,向经过称重的料斗内补充物料是必需的。多种制药生产过程均需要这种补料。这些生产过程包括连续挤出(热融和湿法制粒挤出)、连续直接压片和连续湿法制粒。

图1 安装在圆盘式重量传感器上的Coperion K-Tron公司失重式喂料机
喂料机补料。可以采用手动方式或自动方式补料。手动方式意味着由设备操作者将一定数量的散料投入到喂料机料斗内,随后生产过程继续。而自动方式意味着处于喂料系统控制下的补料设备从上游供料源将物料添加到喂料机料斗。
过去,在整个补料阶段全程采用恒定的电机转速,这个转速对应于与马上就要进入补料阶段之前失重喂料阶段的电机转速。举例来说,在系统感测到需要给供应料斗补料之前最近时刻的转速平均为60 RPM,则转速将在本次补料作业期间保持在这个60 RPM的速度。在补料完成后,物料稳定下来,喂料机感测到正在适当减轻的系统重量,则喂料机返回至失重模式,此时转速再次变成了控制参数。
这种技术存在2个相关问题,第一,在补料期间,喂料机只作为体积式喂料机工作。第二,在再次进入真正的失重模式时,喂料机速度有可能发生突然变化,导致在一定程度上延长的偏离设定流量时间段,直至喂料机稳定进入新的正确流速为止。
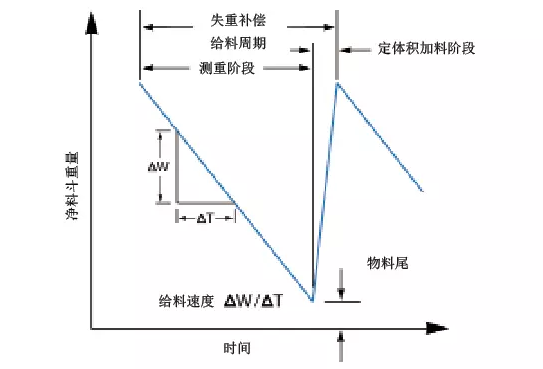
图2 失重补偿给料工作原理
如图2所示绘制了一幅料斗重量对时间的变化曲线图,图中显示出正在下降的重量信号,其斜率即为喂料速率(每单位时间内系统重量的变化量)。请注意,在进入补料作业阶段之前,料斗并没有完全倒空,主要用于确保在球斗中形成一直存在的物料供应流,让喂料过程可以不间断继续执行。另外,如果不存足够的物料在球斗中,则在补料过程当中,正在进入并且可能夹杂空气的物料形成的不断增大的压力有可能导致物料不受控制地猛冲流过喂料机。
即使有发挥着隔离作用的物料存在,随着料斗的注满,计量区域内的物料堆堆密度也将升高。在补料期间螺杆转速恒定的情况下,这种堆密度上升将导致喂料精度严重降级(喂料过多),因为将有越来越多的物料进入料斗,并将物料压实在料斗的下半部分区域。精度受到的影响会达到多少呢?这个答案取决于料斗尺寸/几何形状以及物料本身的可压实性。
涉及数百种物料的实验室试验和现场使用经验表明,在实际使用当中,与顶部负荷相关的LIW喂料过多对于堆密度相对恒定的物料来说可能处在+/-1%的范围内。但是,对于粉末和其它堆密度变化显著的物料,这种变动范围可能高达+/-10~15%。当在连续生产当中处理可以压实的药品粉末时,这种变动有可能显著影响到精度。
采用智能补料算法,通过开发一种存储和趋势分析重量与速度关系的控制方法避免了这些问题。这种方法称为智能补料技术(SRT),其中抛弃了保持恒定转速的方式。在自动补料期间,不再将喂料机控制系统切换至恒定转速控制方式,而依靠在上一个喂料周期内获得的趋势分析数据。随着料斗清空,针对对应的电机速度进行趋势分析。当执行补料时,对应的料斗重量将采用相同的对应电机速度(如图3所示)。
补料窗口必须针对所进给的物料及其特性来进行评估。SRT使得螺杆转速能够在补料期间逐步降低以精密地抵消物料随着料斗重量增加而在计量区域发生的物料堆堆密度增大的影响。通过这种方法,可以在短暂的补料作业当中保持喂料精度。
智能加料技术
如图3所示说明了智能补料技术(SRT)方法。其中上图绘制了净料斗重量对时间曲线图。开始时,料斗是满的(净料斗重量等于补料完成重量),此时喂料处于有效阶段,喂料机正常工作。随着净料斗重量下降,控制器还会测定和存储一组最多可达100个的喂料系数,其中每个系数均为在与该喂料系数相关联的料斗重量点处物料的平均堆堆密度指数。
低喂料系数表示要求采用更高的螺杆转速才能喂出给定重量的物料,这意味着物料堆密度已经降低。相反,较高的喂料系数反映了较高的物料堆密度,因为只需较低的转速就能输送相同的物料重量。
图3 智能加料控制概念
图3 智能加料控制概念
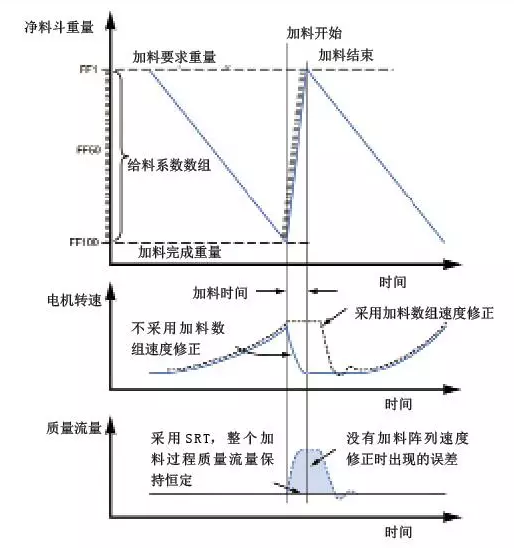
图3 智能加料控制概念
图3的中图显示了螺杆转速对时间曲线图。在失重式喂料阶段的早期部分,螺杆转速相对恒定,因为喂料机计量区域内的物料堆密度相对恒定,比喂料周期后续时间段的堆密度高,不会发生显著变动。这是因为典型料斗内的上部物料很大程度上得到了下部物料的支撑,而且,依次再得到了料斗下部的锥形斗壁的支撑。随着喂料作业的继续,料斗料位下降,计量区域的顶部负荷开始减轻,导致物料堆密度降低以及为了保持喂料速度所要求的电机速度的相应升高。当料斗重量达到补料要求阈值时,补料阶段开始执行。
在补料过程期间,SRT以补料请求时有效的转速开始,然后随着每一个料斗重量“层”的发生,通过应用对应的喂料系数,修改转速。
通过采用这种更为复杂的方法,就可以流畅地退出补料阶段,返回至真正的失重模式。此外,通过根据最近喂料周期历史数据在补料期间控制喂料机转速,就可以避免采用体积模式,切实保证喂料精度。
确定补料间隔时间
一般来说,补料时段应当大约为6~10 s。这样的时间段能够确保对正在进给的物料实施积极的控制,又不会扰乱下游过程。但是,对于许多药业生产作业来说,因为作业的整体时间跨度更短,补料窗口可以比以上时间短得多。
由于重点在保持喂料机在大多数连续作业期间处于失重控制之下,经常会采用更为频繁和更短时间的补料作业,典型方式利用补料料斗容积的大约60~80%。这样的补料窗口对于喂料机的整体运行可能具有极为关键的意义,并且必须针对所进给的物料及其特性进行评估。
出于这个原因,在处理任何类型的物料进料作业时,包括补料作业,必须研究散装固体的各项特性,诸如容积堆密度、粒径、可压实度、休止角、透气性、颗粒形态以及摩擦角。这些物料特性当中的每一项都将在极大程度上不仅影响物料从料斗向喂料机的流出,而且影响至料斗补料的速度有多快。
例如,如果散装物料具有高透气性(也就是说如果夹杂气体可以快速从物料当中逸出),则补料可以按最快可行速度执行。另一方面,如果散装物料透气率低(也就是说气体会导致散装物料变得膨松起来,并且气体不能快速逸出以致固体不能恢复至其静置条件),则必须在补料作业当中谨慎处理,因为这些物料经常容易在这种条件下溢出,或者至少会出现明显的容积堆密度变化。
例如,如果在补料期间发生了散装固体溢出现象,则产品有可能很容易被冲出LIW喂料机。最低程度上,可能会在补料期间和刚加完料时发生的气体卷吸效应会导致容积堆密度大幅变化,这是由于控制系统采用了前期运行所产生的控制数据,而此时产品堆密度已经比前期高得多了。
空气卷吸现象发生的原因在于料斗的快速补料,在这样的情况下,空气无法快速逸出,流经正在进入的物料,到达补料料斗的低压区域。对经计重后料斗进行排气处理可以最大程度减少这个问题,但当前必须设置的集尘装置以及在使用活性材料时设置过滤装置。充分的排气将有助于物料沉静下来,并有助于更快速恢复至真正的失重运行。
选择补料装置
位于喂料机料斗上方的补料装置拥有多种选择。备选方案包括蝶阀,或者,在要求进行极高精度控制时,可以采用其它备选计量装置,诸如体积式螺栓喂料机。此外,经常在蝶阀上方使用气动上料机以便将物料输送至位于喂料机料斗上方的接收器内。
应当注意,如果补料系统没有考虑到喂料机料斗的容量、散装固体的流动特性以及散装物料在各容器之间的距离和可能的贮存容量。如果散装物料透气率低,则必须注意避免物料溢出。例如,在从中间散装容器(IBC)对喂料机料斗执行补料作业时,产品在这些容器内的容积经常超过喂料机料斗的容积。很明显,除非对补料阀的开启和闭合周期确立时间窗口,否则就不可能控制过补料作业以避免出现喂料机料斗溢出的问题。
这个时间窗口可以根据物料的容积堆密度、休止角(指出喂料机料斗的静止料位)以及流经加装装置的流速计算出来。在从料仓或IBC当中排出物料时,而且这些装置有可能配备了流动辅助装置(例如振动器或活底料仓),则必须特别注意将这些装置的振动与喂料机料斗隔离开,以确保不会给LIW喂料机的重量测量装置造成任何干扰。
正如以上所述,补料装置流量必须足够大以避免超出补料时间限值。此外,选定补料装置的流体截止动作必须快速。补料流体缓慢收细式的截止方式没有必要地延长了补料用时;补料装置的任何泄漏现象可能造成不可避免的明显重量扰动,但是将一定会导致正方向上的流量错误。
将制药级真空接收器作为补料装置。根据稀相真空转移原理工作的制药级接收器,经常当作补料装置使用,特别是对于连续生产作业。气动接收器可以在其出口处安装一个蝶阀,或者可以作为定体积喂料机的组成部分,这种喂料机出口处设有一个阀门。气动系统利用负压来将物料抽吸到一个单独安装和支撑的真实接收器内。
接收器将充填到一个已经确定的料位,并随后保持这部分物料加注量,直至下方的喂料机要求执行补料为止。在接收器内加注的料位取决于料位传感器。在喂料机发出补料要求的时间点,放料阀门打开,接收器内装物料将排入至喂料机料斗。
在这次释出物料的同时,通过装设在真空接收器内部的过滤器发出一次气体脉冲,将所有陷入过滤器或者沉积在过滤器上的颗粒物冲击解脱出来。过滤器材料选项包括具备快速解脱和易清洁特性的叠层膜型材料。
在将物料倾倒至下方的喂料机料斗之后,这个阀门再次闭合,接收器抽真空周期立刻开始,这样气动接收器将立刻准备好接受下一次补料要求。使用气动接收器作为补料装置可以将散料容器作为不间断补料作业的供料源。
补料方法和对补料算法的控制对于高精度连续生产系统具有重要意义。气动接收器能够避免可能发生的喂料机料斗溢出。但是,应当注意到,在某些情况下,更加偏向于重力自流(而不是气动输送)补料方式。重力自流补料典型情况下会采用一台位置高于喂料机料斗的IBC,这种系统应当采用与要求的喂料机补料料位直接关联的调制控制阀以避免溢出,正如前文讨论过的一样。
总结
LIW喂料机的补料方法和补料算法控制是高精度连续生产系统最优性能达成和设计工作的重要过程。通过仔细评估喂料过程、系统布局以及物料特性,可以对连续喂料和补料系统进行优化。


![]()
2001-2009Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


加载更多